|
|
Регулирование температуры |
|
Немного поясню. У меня уже имеется готовая система измерения и регистрации температуры на модуле АДАМ-4019. Измеряю две температуры, от 0 до 500 градусов и от 0 до 1000 градусов, при помощи термопар. Все эти данные регистрируются в файл. Нагревательный эелемент, самодельный, запитывается от трансформатора 30В 10А, имеется оптронный симистор. Как на этой базе сделать регулирование температуры от 0 до 1000 градусов, с точностью +- пять градусов. С уважением egor |
|
 |
|
|
Самый простой способ - это релейный. Т.е. задаешь в "реле" две уставки по температуре - уставку срабатывания "реле" и уставку возврата "реле". "реле" - реализуешь алгоритмом через 2 IF. 1. Уставка - включения нагревателя Твкл=Тзад-5 град. 2. Уставка - выключения нагревателя Твыкл=Тзад+5 град. При этом получешь релейную - автоколебательную систему управления температурой, которая автоматически поддерживает заданную температуру в диаппазоне Т=Тзад+/-5 градусов. Алгоритм может выглядеть, например, так: Тзад - уставка требуемой температуры (может задавться во всем диаппазоне температур 0-1000 С), градус С. дельтаТ - допустимый диаппазон отклонения температуоы от заданной, градус С. Тогда Если Т<=Тзад-дельтаТ, включить нагреватель. Если Т=>Тзад+дельтаТ, выключить нагреватель. Ну еще надо учесть что при Т от 0 до 500 данные берешь с первой ТП, а при Т от 500 до 1000 со второй ТП. PS: можно делать и более узкие диаппазоны срабатываний, например +/- 1 или +/-2 градуса. Отличие будет только в периоде режима Вкл/Выкл нагревателя. Ограничителем данного метода управления может быть и режим нагревателя и точность (устойчивость) измерения температуры. |
|
|
|
|
Второй способ построение импульсного или непрерывного регулятора тепмературы. Для "простых" систем подходит ПИ - регулятор (пропорционально - интегральный). На вход регулятора подается разность заданной температуры и измеренной. На выходе регулятора формируется сигнал требуемой мощности нагревателя. В АДАМ-ах есть стардартные ПИ-регуляторы, хотя можно записать и через уравнение в приращениеях. Для импульсной системы - генетируешь тестовый тепловой импульс, скажем U=30V, I=10 A, delta_t1=1 секунда (минута) и замеряешь на сколько изменилась температура deltaT0, grad. Далее, например, величину (длительность) теплового импульса рассчитываешь по выражению delta_t=deltaT/deltaT0*delta_t1/N, где: delta_t - длительность 1 импульса, deltaT - текущая разность заданной и измеренной температуры, deltaT0 - измененение температуры на 1 тестовый тепловой импульс, delta_t1 - длительность тестового импульса, N - количество импульсов, которое требуется для набора заданной температуры. Фактически, данный регулятор работает с широтноимпульсной модуляцией тепловых импульсов. Можно использовать более сложный метод с предсказанием установившегося значения, но для него нужно замерять не только температуру, но и скорость её изменения. Тогда становиться возможным набирать заданную температуру по заданному закону (линейно, экспоненциально и др.). Скорость изменения температуры можно и рассчитывать: dT/dt=(T1-T0)/Delta_t. Поэтому для управления температурой в переходных процессах и точного поддержания температуры в установившихся режимах желательно использовать оба метода. |
|
|
|
|
egor, для получения качественного регулирования необходимо изучить обьект регулирования. Желательно определить постоянные времени тепловой инерции обьекта нагревания и самого нагревателя. Это поможет правильно настроить регулятор и улучшить качество регулирования. Зачем "это" надо? Простой пример, температура обьекта достигла Т=Тзад+ДельтаТ, регулятор отключает нагреватель, но из-за инертности процеса остывания нагревателя температура обьекта может поднятся выше Т2>Т=Тзад+ДельтаТ заданной. Поэтому отключать нагреватель стоить несколько раньше, чем Тзад+ДельтаТ. Насколько раньше поможет определить только эксперимент. Тоже относиться и к процессу включения нагревателя. |
|
|
|
|
вобщето правильнее использовать связку ПИД (хотя и ПИ будет вполне достаточно) плюс ШИМ с дискретным выходом и тиристорным ключом , и будет тебе счастье
|
|
|
глаза боятся, а руки такое выделывают....,что глаза лучше вообще закрыть
|
|
|
|
|
Уважаемое собрание, встала похожая задача. Б/у печка, смонтированы симисторы (трехфазка). Предыдущий инженер прикупил ПИД-регулятор с транзистором на выходе :). Слышали ли о каких-нибудь приспособах (с транзистора управлять симисторами)??? |
|
|
|
|
ну все равно должен быть какой-то блок развязки между симистором и транзистором. |
|
|
Best Regards!
|
|
|
|
|
Пусто |
|
|
|
|
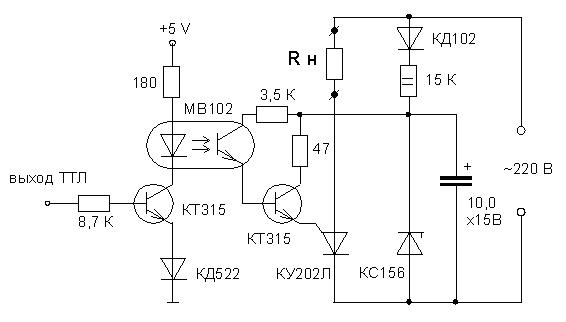
Если симисторы-тиристоры советские, типа КУ202 - КУ208, ставили развязку на АОУ103, ну или вот так :
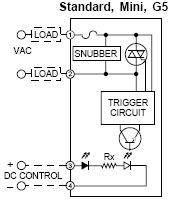
а в импортных сейчас развязка уже предусмотрена :
|
|
|
|
|
Можно использовать такую штуку: |
|
|
|
Ответить 
|
Страница <123 |
| Переход на форум | Права доступа на форуме  Вы не можете публиковать новые темы в этом форуме Вы не можете отвечать на сообщения в этом форуме Вы не можете удалять Ваши сообщения на этом форуме Вы не можете редактировать Ваши сообщения на этом форуме Вы не можете создавать голосования на этом форуме Вы не можете выражать своё мнение в голосованиях на этом форуме |







 . Раньше, как говорят, стоял яблок made in USSR. Блок выкинут, регулятор куплен, симисторы стоят в шкафу.
. Раньше, как говорят, стоял яблок made in USSR. Блок выкинут, регулятор куплен, симисторы стоят в шкафу.