
|
|
ПИД-регулятор |
|
Подскажите пожалуйста, где можно почитать о настройке ПИД-регуляторов опытным путем. Как правильно подобрать коэффициенты, если построить математическую модель процесса не возможно?
|
||
 |
||
|
Если не напрягает английский, то множество статей есть на |
||
|
||
|
Наладка регуляторов в теплоснабжении часть1
Наладка регуляторов в теплоснабжении часть2 Наладка регуляторов в теплоснабжении часть3 Наладка регуляторов турбинного оборудования часть 1 Наладка регуляторов турбинного оборудования часть2 Наладка системы регулирования процесса горения ru/docs/rd/153-34-1-35-418-2002-2.doc">Наладка системы регулирования процесса горения часть2 Наладка системы регулирования процесса горения часть3 Наладка системы регулирования процесса горения часть4 |
||
|
||
|
||
|
Спасибо, я этот сайт знаю - посмотрю сам. |
||
|
||
|
Еще вопрос. Контролируемая величина ПИД-регулятор постоянно колеблется возле уставки. При этом регулирующий орган совершает значительные колебания. Настройкой коэффициентов ничего добится не удалось. Сделал следующее: задал зону нечувствиетльности, в этой зоне в программе сбрасываю накопленую интегральную составляющую в 0, значения коэффициентов П, И, Д тоже задаю в этой зоне 0. Правильный ли такой подход?
|
||
|
||
|
Могут возникнуть проблемы на границах зоны.
Т.е. надо делать так, чтоб "функция управления не была кусочно-непрерывной", т.е. чтобы Uвых = F(Uвх) было без разрывов и желательно монотонной |
||
|
SY,
EK |
||
|
||
|
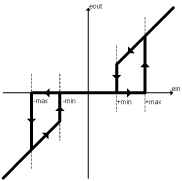
В результате такого подхода Вы получите значение управляющего воздействия, равное 0. Кстати, какой у Вас тип исполнительного механизма: пропорциональный или же интегрирующий? Зона нечувствительности должна выполнять следующую функцию: при малых значениях ошибки регулирования (задание вычесть выходной сигнал объекта) превращать эту ошибку в 0. Таким образом при выходе объекта на уровень задания с учетом величины зоны нечувствительности регулятор остановится, т.е. ошибка регулирования 0 и интегрировать нечего. Графически алгоритм работы зоны нечувствительности с функцией антидребезга можно отобразить например так:
Желаю успехов |
||
|
||
Интегрирующий. Заслонка, управляемая электродвигателем с преобразователем частоты. Управляется заданием скорости: 0 - стоит, +/- - закрывается/открывается.
При ошибке = 0 остается накопленная интегральная составляющая, т.е. привод вращается. Поэтому я и ввел принудительный сброс интегральной составляющей в зоне нечувствительности. Хочу посоветоваться, не приведет ли это к другим нежелательным последствиям. |
||
|
||
|
В таком случае Вам необходим не ПИД, а ПДД регулятор. После интегрирования исполнительным механизмом из ПДД получается ПИД. Управляющее поздействие ПДД закона меняется от -100% до +100% (в отличие от 0...100% у ПИД). Самый простой способ получть ПДД - это подавать на объект не само управляющее воздействие с ПИД регулятора, а его приращение (разницу текущего вычисленного значения и значения вычисленного на предыдущем периоде квантования). В таком случае Вы как-раз и получите в установившемся режиме значение с выхода регулятора, равное 0. При этом не надо обнулять настройки (кто Вам такое, интересно, подсказал). Кстати, и зона нечувствительности все равно нужна и здорово помогает. А вообще если нет соответствующих навыков в подборе структуры регуляторов и настройки их параметров, советую поступить еще более просто. Использовать И регулятор с единственной настройкой: вычисляете ошибку регулирования, пропускаете ее через зону нечувствительности (см. выше), умножаете на некий коэффициент (он и является единственной настройкой) и подаете на Ваш частотник. Получаете: направление движения определяется знаком ошибки, а его скорость зависит от модуля ошибки. Все! Просто и красиво - как раз для интегрирующих исполнительных механизмов. Не так оптимально как ПИД, но на практике в 90% случаев этого вполне достаточно. Желаю удачи!!! |
||
|
||
Ответить 
|
Страница 123> |
| Переход на форум | Права доступа на форуме  Вы не можете публиковать новые темы в этом форуме Вы не можете отвечать на сообщения в этом форуме Вы не можете удалять Ваши сообщения на этом форуме Вы не можете редактировать Ваши сообщения на этом форуме Вы не можете создавать голосования на этом форуме Вы не можете выражать своё мнение в голосованиях на этом форуме |






 Надеюсь был полезен!
Надеюсь был полезен!