|
|
PID в WAGO_IO_PRO 32 |
|
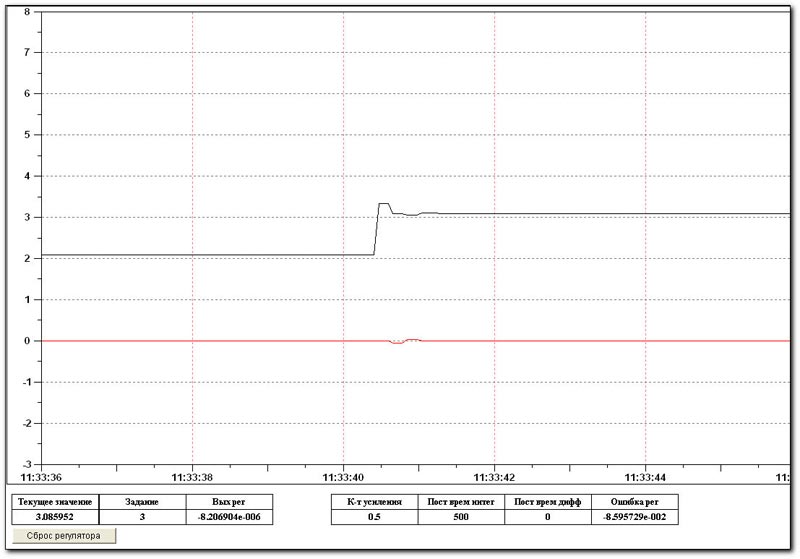
Большое перерегулирование свидетельствует о том, что выбранный нами к-т KP передачи слишком велик. (при отсутствии дифференциальной составляющей) Есть много возможных вариантов расчета настроек регуляторов. Все они достаточно сложны для изложения здесь. Вы можете обратиться к соответствующей литературе при желании. Мы же ограничимся простым подбором. Уменьшим KP до получения приемлемого перерегулирования. Допустим нас устроит регулирование за один период, для обеспечения этого процесса достаточно KP=0.5 |
||
 |
||
|
Пропорциональный закон обладает одним существенным недостатком (в случае отсутствия в самом объекте интегральной составляющей) регулятор может остановиться при значительном отклонении регулируемого параметра. Именно интегральная составляющая вносит в передаточную функцию всего контура явление добегания и обеспечивает подгонку параметра под задание. Интегральная составляющая характерезуется временем интегрирования которое означает если мне не изменяет память время удвоения текущего воздействия регулятора. Дифференциальная составляющая обеспечивает реакцию регулятора на скорость изменения контролируемого параметра, то есть чем больше скорость изменения тем силнее будет реакция регулятора. Предлагаю вам помучить мой пример без дальнейших пока слов…
|
||
|
||
|
PS: Я недавно получил права, год наверное еще не прошел и помню свой дикий восторг по поводу полного недоумения учеников нашей группы (а особенно учениц), вызванного ответом на один из билетов экзамена ПДД о поведении водителя при заносе: “…быстрым, но плавным поворотом руля…” Вот точнее не скажешь |
||
|
||
У меня не WAGO_IO_PRO CAA, а WAGO_IO_PRO 32
Этот пример в какой среде открывать нужно?
З.Ы. Попробовал сделать так: у меня зона пропорциональности 2,7градуса, на вход ПИД тоже подаю величины в градусах, на выходе наверное тоже в градусах получается... Величина на выходе начинает расти от 0(градусов), за потолок принял 2,7 градуса, ну и по пропорции считал длину импульса ШИМ... |
||
|
||
|
А вот меня в этой формуле сильно смущает то, что ACTUAL - входная величина. Может быть так: OUT = OUT + KP(E+TI+TD)? |
||
|
||
Ага, попутал, выглядит так: OUT = ACTUAL + KP(E+TI+TD) |
||
|
||
|
Опечатка это. Давайте развивать левые полушария: Чисто пропорциональный регулятор: OUT=ACTUAL + KP(DESIRED-ACTUAL) OUT=(1-KP)ACTUAL + KP*DESIRED А вот пусть KP=1, тогда OUT=DESIRED. Не ругулируеца, однако. Если же, OUT=OUT + KP*DESIRED - KP*ACTUAL, Пусть KP=1, OUT=OUT+DESIRED-ACTUAL. Регулируеца? |
||
|
||
|
Хотя нет, похоже я не прав. не то полушарие развиваю.

|
||
|
||
|
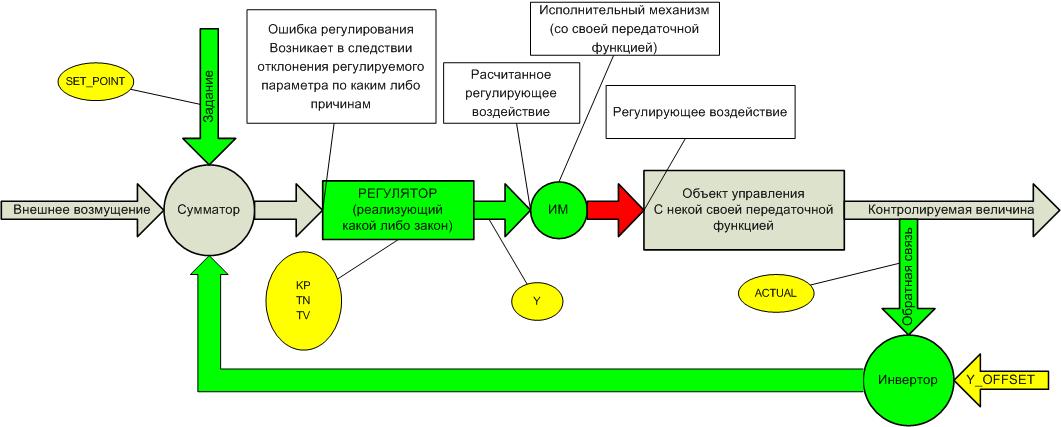
Пример собственно написан в CoDeSys 2.3.8.5 я пологал что вы в этой среде работаете. В примерах на графике фактически реализован П регулятор так как влияние И и Д состовляющих я загрубил по максимуму. огород не стоит городить с формулами используйте алгоблок PID регулятора принцип его установки прост однако в отличие от разборок с настройками. Выглядит это прибно так:
|
||
|
||
|
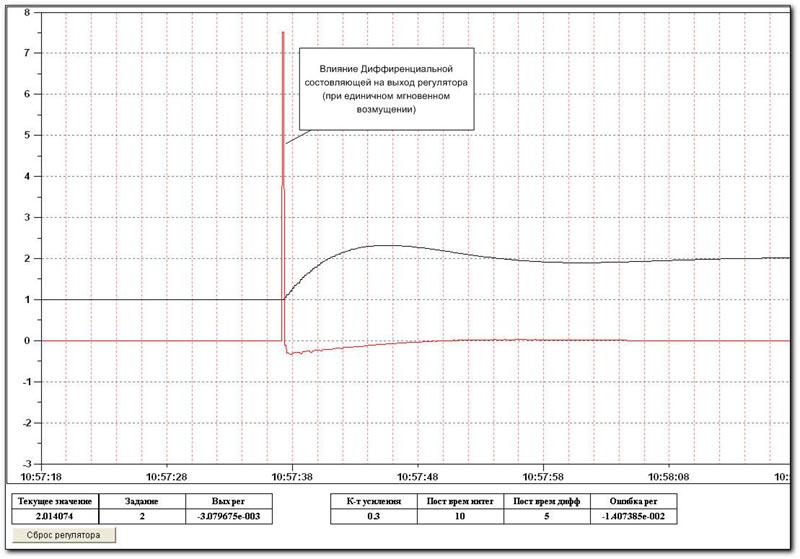
Несколько изменил пример, реализовал объект управления с интегрирующей передаточной функцией, ну например это может быть бак с водой. Живая модель объекта позволяет детально наблюдать работу регулятора, в частности увидеть реакцию на мгновенное единичное воздействие.
|
||
|
||
Ответить 
|
Страница <1 3456> |
| Переход на форум | Права доступа на форуме  Вы не можете публиковать новые темы в этом форуме Вы не можете отвечать на сообщения в этом форуме Вы не можете удалять Ваши сообщения на этом форуме Вы не можете редактировать Ваши сообщения на этом форуме Вы не можете создавать голосования на этом форуме Вы не можете выражать своё мнение в голосованиях на этом форуме |